Guide: Redpine – the fastest radio protocol
Redpine is the new radio protocol optimized for the speed. It is currently the fastest radio protocol in the world.
How does the Redpine protocol work?
The Redpine protocol is working at 1.5ms loop time (or in other words at 666Hz 😈). This enables the latency of only 1-5ms from transmitter gimbal to Betaflight Dshot motor output. Compared to 7-20ms with Crossfire on Taranis and 18-37ms with FrSky_X to X4R on a Taranis. Also for the comparison the fastest ImmersionRC Ghost system ‘Pure Race’ rate runs at the 222.22Hz frame rate that is 3 times slower than Redpine protocol.
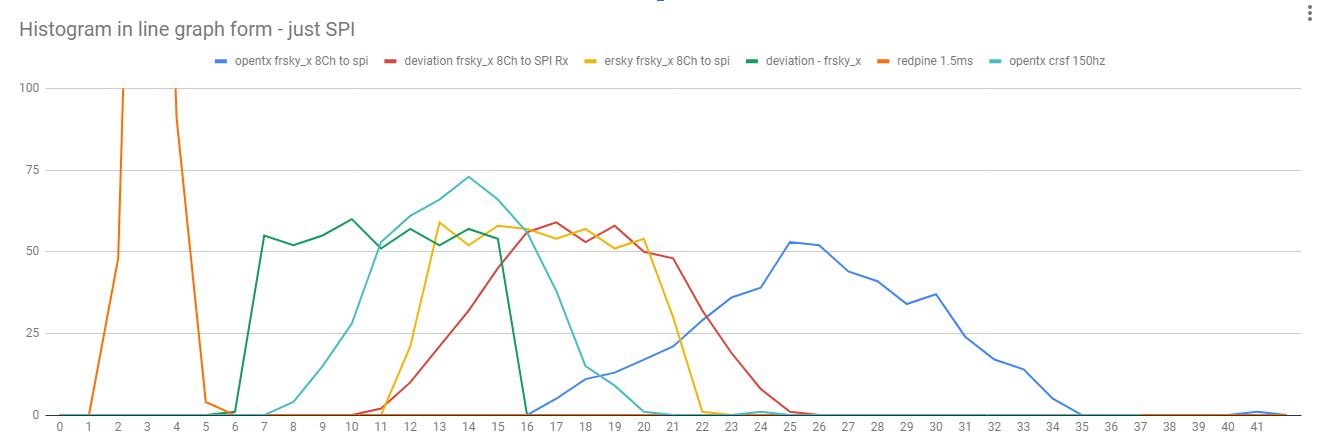
Protocol latency chart
The Redpine packet consists of 4 11-bit channels and 12 1-bit aux channels. In other words each of the AUX channel is only on or off. The 3-pos switches works as 2-pos and sliders or pots have only on or off values. All this is made for the minimization of the packet size.
Developer of the Redpine protocol had to give up the telemetry for the sake of the speed. Telemetry substantially increases the latency as you need to switch the receiver into transmitting mode and sent the telemetry data back to the radio.
Because of the increased bitrate, the Redpine protocol has slightly lower range than for instance the FrSky D8 protocol, but still should be enough for the range of the 25mW video transmission.
Compatibility
Receiving side
Redpine protocol support was added in the Betaflight version 4.2.
Redpine protocol is supported on the AIO flight control boards with integrated SPI FrSky receiver. These boards are (just some of them):
BetaFPV – F4 1S Brushless Flight Controller V2.2 (Meteor 65)
Happymodel – Crazybee FR V1-3, CrazybeeX FR, Crazybee F4 Lite 1S and Nano X (Mobula 6, Mobula 7, Sailfly X)
See the complete list of the whoop/toothpick flight controller boards here: List of brushless whoop/toothpick flight controllers
Transmitting side
Redpine is working on all internal and external multiprotocol radio transmitter modules. Redpine protocol works with the multiprotocol firmware version v1.2.1.67 and newer.
Redpine is not working on the native FrSky modules (Taranis, Horus, X-Lite etc.) as they contain some proprietary code.
How to set up the Redpine protocol?
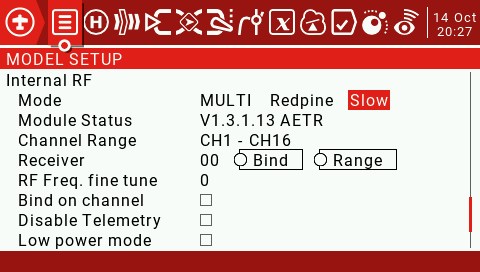
On the radio transmitter, go to Model Setup, then select the the Redpine protocol as shown below.
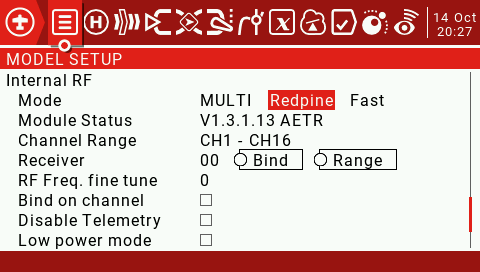
There are two sub-protocol options Fast and Slow. Fast is obviously the fastest option, sending the packets every 1.5ms and the Slow option that increases the control range by a packet every 19ms at a much slower modulation with some FEC (forward error correction).
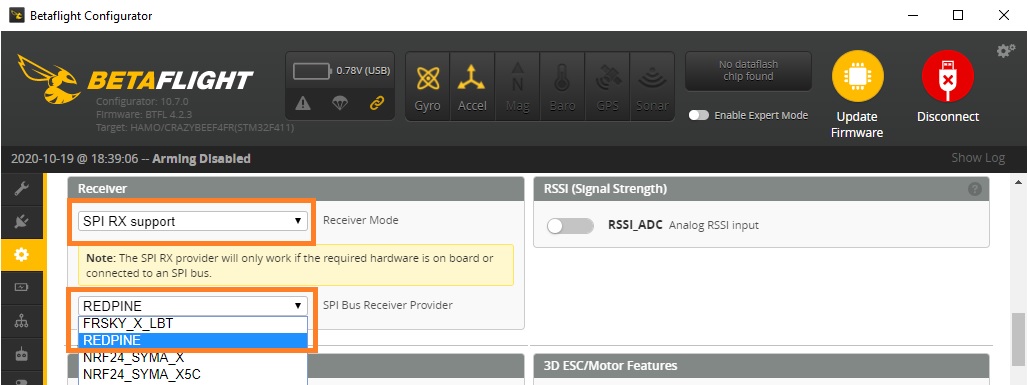
On the receiver side (or better say the flight controller side) you need to set the Receiver mode to “SPI RX support” and SPI Bus Receiver Provider to “REDPINE“.
Or you can set the Redpine protocol by this CLI command:
set rx_spi_protocol=REDPINE
save
Binding
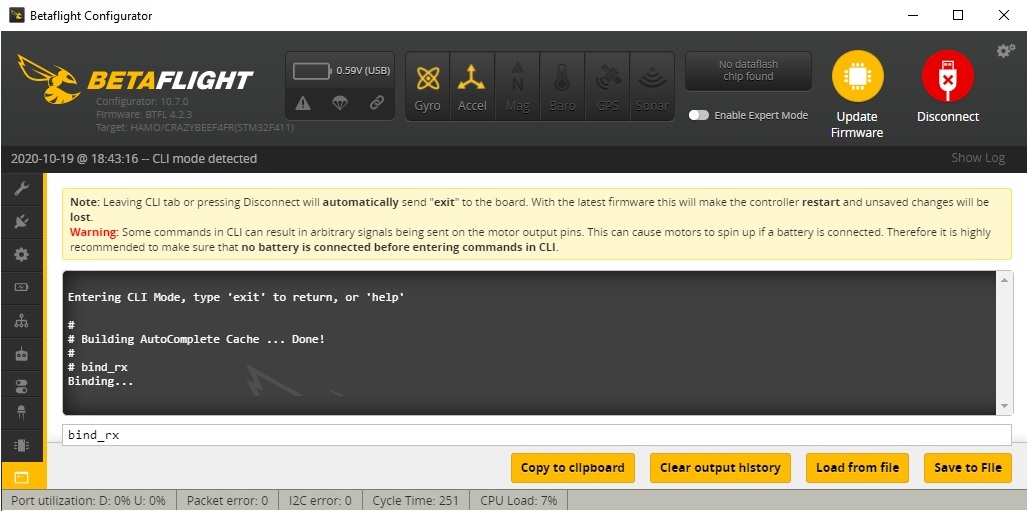
After you set the Redpine protocol on both, the transmitting and receiving side, you will need to bind your receiver to the transmitter. My preferred way of the binding is to issue the command in CLI mode:
bind_rx
The main discussion thread on RCGroups: https://www.rcgroups.com/forums/showthread.php?3236043-Redpine-Lowest-latency-RC-protocol
Thanks to Bryce Johnson for the development of the Redpine protocol!
-
 ESC Firmware Guide
In this concise overview, we’ll explore the evolution of ESC (Electronic Speed Controller) firmware,
ESC Firmware Guide
In this concise overview, we’ll explore the evolution of ESC (Electronic Speed Controller) firmware, -
 List of brushless whoop/toothpick flight controllers
This is the list of brushless tiny whoop/toothpick style flight controllers with brief description
List of brushless whoop/toothpick flight controllers
This is the list of brushless tiny whoop/toothpick style flight controllers with brief description
Nice indeed and running perfectly and jitter free with the much underrated Deviation TX.
Check also out the ExpressLRS project, the guys are making tremendous efforts. It available for 868, (you can flash your R9 Gear or build it yourself) it is technically a better link and much faster than R9 and Crossfire. Also a sx1280 based 2.4ghz version is available it can currently run at 500hz update rates (faster than Ghost) and has much smaller antenna. As it is open source, community can help in evolution and support.
Thanks for your comment. Yes, ExpressLRS is indeed very interesting project. It uses modern LoRa chips, you can choose between 900MHz or 2.4GHz, but it has one drawback – it is DIY project. So not for everybody. Redpine works out of the box. It is already implemented in the Betaflight and in the multiprotocol firmware, no DIY needed.
Anyway those two beasts are from the different worlds for different tasks. They both have its own cause.
As far as I am aware we cannot flash Redpine firmware on our Frsky receivers and or any of the clones, as there is a very limited nr flight controller with SPI receivers, and if so they are often without pa/lna and diversty. so it will limit repine to some whoops etc?
For Express LRS you can flash at least the R9 system (tx module and receivers, also Ghost hardware seems to be compatible) But maybe some vendors, can provide hardware sooner or later, as it is open……
But certainly SPI approach is nice, less weight less components and simple to keep your whole system updated inc RF link to latest standards.
Here’s a quick tutorial: https://www.youtube.com/watch?v=Z_NIrUqtQPs